Reversing Single Phase Motor
Throughout my career, I've observed that the conventional method of reversing a single-phase motor involves the manual reconfiguration of wiring connections. Recognizing the need for greater efficiency and automation, I embarked on a project to address this issue. I developed a schematic module that incorporates a user-friendly button interface, enabling seamless motor direction reversal, akin to the convenience found in three-phase motors. Subsequently, I designed and implemented a PLC (Programmable Logic Controller) program, employing structured text programming techniques. This program, coupled with a user-friendly interface, serves as an innovative solution to streamline and automate industrial processes reliant on single-phase motors. My project not only simplifies motor reversal but also enhances operational efficiency, illustrating my commitment to advancing automation within industrial settings.
9/29/2023
Goals
Simplify motor reversal:
The primary goal is to simplify the process of reversing a single-phase
motor.
This simplification eliminates the need for manual rewiring and streamlines the operation
through a
user-friendly interface.
Automation:
The project seeks to automate the process of reversing single-phase motors. Automation
reduces the risk of human error and ensures consistent and reliable motor direction
changes,
ultimately
improving process reliability.
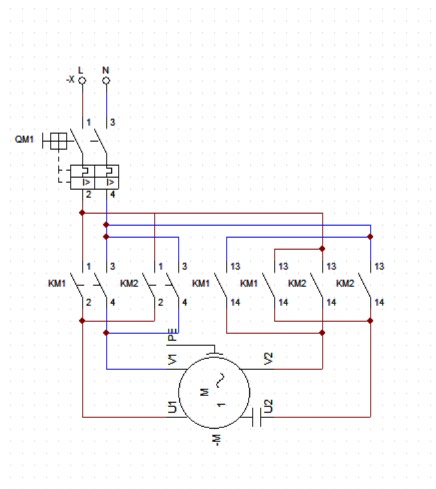
Schematic
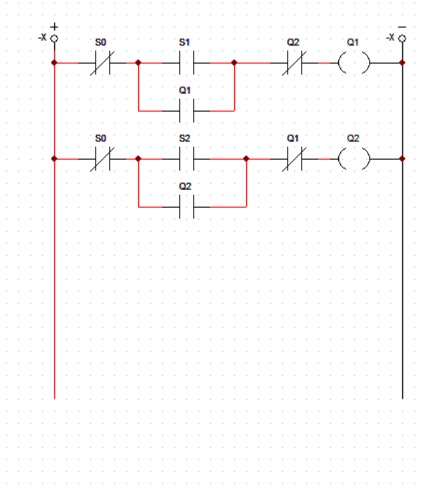
PLC Ladder
Code example in java
Java
import java.util.Scanner;
public class Main {
public static void main (String[] args){
Scanner scanner = new Scanner(System.in);
System.out.println("Motor control");
//I define output variables for my coils
Boolean Q1=false;
Boolean Q2=false;
//I define my NO auxiliar contactors where i have 2 for KM1 and 2 for KM2
Boolean NO1KM1=false;
Boolean KO2KM1=false;
Boolean NO1KM2=false;
Boolean KO2KM2=false;
while(true) {
System.out.print("Enter a command (forward, reverse, stop,exit): ");
String option = scanner.next().toLowerCase();
if(option.equals("forward")){
if(!Q1&&!Q2){
System.out.println("Motor started moving forward");
//For move forward I define NO1KM2 and NO2KM2 as true,
// and i set my KM1 as false this mean my output will be
//In my first point T1-T5
//In my start point T1-T3-T2-T8
NO1KM1=true;
KO2KM1=true;
NO1KM2=false;
KO2KM2=false;
Q1=true;
} else if (!Q1&&Q2){
System.out.println("You cant start the motor, its alredy moving reverse" +
" you have to stop it for move it reverse");
} else {
System.out.println("Motor is alredy running forward");
}
} else if(option.equals("reverse")){
if(!Q1&&!Q2){
//For run reverse I define NO1KM1 and NO2KM1 as true and set KM2 as false
// this mean my output will be
//In my first point T1-T8
//In my start point T1-T3-T2-T5
NO1KM1=false;
KO2KM1=false;
NO1KM2=true;
KO2KM2=true;
System.out.println("Motor started moving reverse");
Q2=true;
} else if (Q1&&!Q2){
System.out.println("You cant start the motor, its alredy moving forward" +
" you have to stop it for move it reverse");
} else {
System.out.println("Motor is alredy running reverse");
}
} else if (option.equals("stop")){
if(Q1||Q2){
System.out.println("Motor is stop");
Q1=false;
Q2=false;
} else {
System.out.println("Motor is alredy stop");
}
} else if (option.equals("exit")){
break;
}
}
}
}
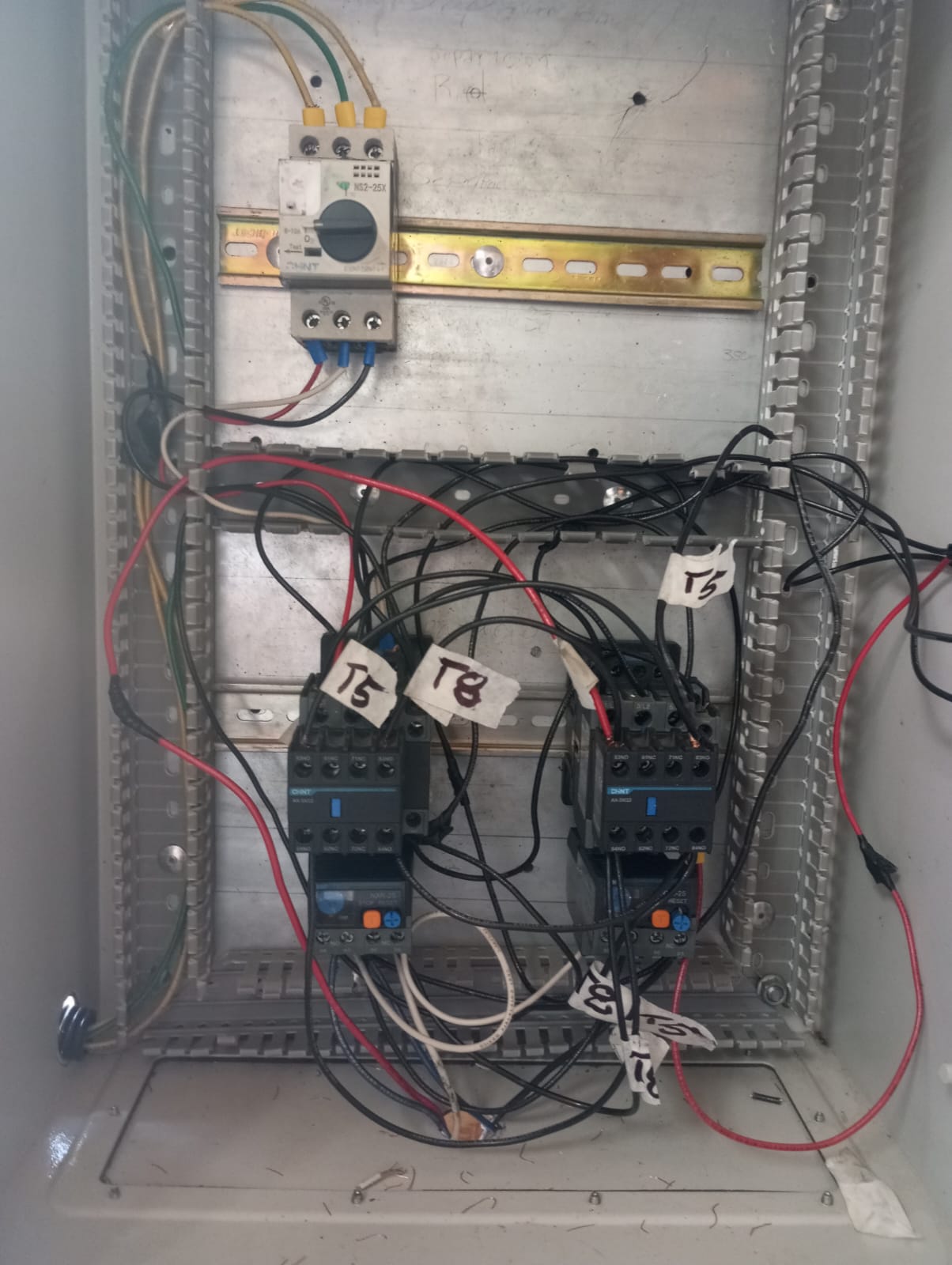
Wire
Demo
Wiring PLC
Project
Automation:
The project seeks to automate the process of reversing single-phase motors. Automation
reduces the risk of human error and ensures consistent and reliable motor direction
changes,
ultimately
improving process reliability.
Schematic
PLC Ladder
Code example in java
Java
import java.util.Scanner;
public class Main {
public static void main (String[] args){
Scanner scanner = new Scanner(System.in);
System.out.println("Motor control");
//I define output variables for my coils
Boolean Q1=false;
Boolean Q2=false;
//I define my NO auxiliar contactors where i have 2 for KM1 and 2 for KM2
Boolean NO1KM1=false;
Boolean KO2KM1=false;
Boolean NO1KM2=false;
Boolean KO2KM2=false;
while(true) {
System.out.print("Enter a command (forward, reverse, stop,exit): ");
String option = scanner.next().toLowerCase();
if(option.equals("forward")){
if(!Q1&&!Q2){
System.out.println("Motor started moving forward");
//For move forward I define NO1KM2 and NO2KM2 as true,
// and i set my KM1 as false this mean my output will be
//In my first point T1-T5
//In my start point T1-T3-T2-T8
NO1KM1=true;
KO2KM1=true;
NO1KM2=false;
KO2KM2=false;
Q1=true;
} else if (!Q1&&Q2){
System.out.println("You cant start the motor, its alredy moving reverse" +
" you have to stop it for move it reverse");
} else {
System.out.println("Motor is alredy running forward");
}
} else if(option.equals("reverse")){
if(!Q1&&!Q2){
//For run reverse I define NO1KM1 and NO2KM1 as true and set KM2 as false
// this mean my output will be
//In my first point T1-T8
//In my start point T1-T3-T2-T5
NO1KM1=false;
KO2KM1=false;
NO1KM2=true;
KO2KM2=true;
System.out.println("Motor started moving reverse");
Q2=true;
} else if (Q1&&!Q2){
System.out.println("You cant start the motor, its alredy moving forward" +
" you have to stop it for move it reverse");
} else {
System.out.println("Motor is alredy running reverse");
}
} else if (option.equals("stop")){
if(Q1||Q2){
System.out.println("Motor is stop");
Q1=false;
Q2=false;
} else {
System.out.println("Motor is alredy stop");
}
} else if (option.equals("exit")){
break;
}
}
}
}
Wire
Demo
Wiring PLC
Project
Java
import java.util.Scanner;
public class Main {
public static void main (String[] args){
Scanner scanner = new Scanner(System.in);
System.out.println("Motor control");
//I define output variables for my coils
Boolean Q1=false;
Boolean Q2=false;
//I define my NO auxiliar contactors where i have 2 for KM1 and 2 for KM2
Boolean NO1KM1=false;
Boolean KO2KM1=false;
Boolean NO1KM2=false;
Boolean KO2KM2=false;
while(true) {
System.out.print("Enter a command (forward, reverse, stop,exit): ");
String option = scanner.next().toLowerCase();
if(option.equals("forward")){
if(!Q1&&!Q2){
System.out.println("Motor started moving forward");
//For move forward I define NO1KM2 and NO2KM2 as true,
// and i set my KM1 as false this mean my output will be
//In my first point T1-T5
//In my start point T1-T3-T2-T8
NO1KM1=true;
KO2KM1=true;
NO1KM2=false;
KO2KM2=false;
Q1=true;
} else if (!Q1&&Q2){
System.out.println("You cant start the motor, its alredy moving reverse" +
" you have to stop it for move it reverse");
} else {
System.out.println("Motor is alredy running forward");
}
} else if(option.equals("reverse")){
if(!Q1&&!Q2){
//For run reverse I define NO1KM1 and NO2KM1 as true and set KM2 as false
// this mean my output will be
//In my first point T1-T8
//In my start point T1-T3-T2-T5
NO1KM1=false;
KO2KM1=false;
NO1KM2=true;
KO2KM2=true;
System.out.println("Motor started moving reverse");
Q2=true;
} else if (Q1&&!Q2){
System.out.println("You cant start the motor, its alredy moving forward" +
" you have to stop it for move it reverse");
} else {
System.out.println("Motor is alredy running reverse");
}
} else if (option.equals("stop")){
if(Q1||Q2){
System.out.println("Motor is stop");
Q1=false;
Q2=false;
} else {
System.out.println("Motor is alredy stop");
}
} else if (option.equals("exit")){
break;
}
}
}
}